NVIDIA Isaac GR00T N1 是世界上首个面向通用类人机器人推理和技能的开放基础模型。
这款由 NVIDIA 推出的模型,不仅标志着机器人 AI 领域的一次重大飞跃,更预示着机器人将从传统的“任务专家”走向具备泛化能力的“环境通才”。

模型亮点与架构解析
GR00T N1 的核心亮点在于其跨载体能力,能够接受语言和图像等多种模态输入,从而在多样化环境中执行复杂的操作任务。它让开发者和研究人员有机会通过真实或合成数据,对特定类人机器人或任务进行后训练,大大降低了开发门槛。
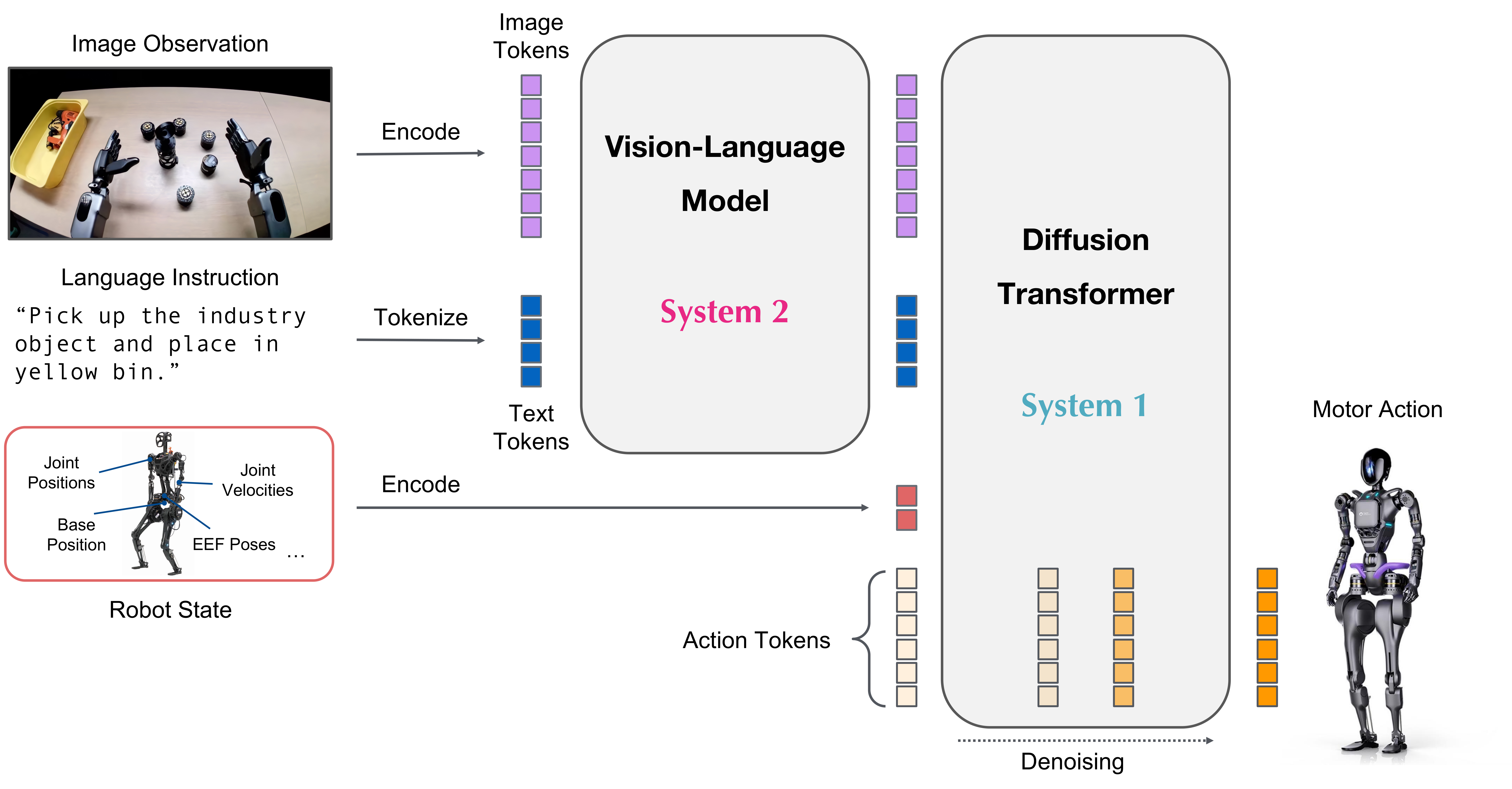
技术架构上,GR00T N1-1B 作为轻量版本,巧妙地结合了预训练的视觉和语言编码器,并通过一个流匹配动作 Transformer 来建模基于视觉、语言和本体感知条件下的动作序列。模型采用 Vision Transformer、多层感知机 MLP 和流匹配 Transformer 的复合结构。
其中,流匹配 Transformer 以 Diffusion Transformer DiT 的形式实现,利用 AdaLN 进行扩散步长条件化。这种设计使得模型能够灵活处理不同载体的可变视图,将图像和语言嵌入有效整合。
跨机器人平台能力
GR00T N1 的“跨载体”设计是其最引人注目的特性之一。
这意味着它能够适应并应用于多种形态的机器人平台。通过输入图像帧、机器人本体感知数据、语言指令和载体 ID,GR00T N1 展现出强大的通用性,旨在实现技能在不同机器人之间的泛化和迁移。这种创新让机器人不再局限于单一硬件,而是能够以更灵活的方式学习和执行任务。
广阔的应用前景
这款模型为机器人领域带来了无限可能。对于研究人员、学者和开源社区而言,GR00T N1 是进行 AI 驱动机器人研究和算法开发的关键工具。
开发者可以利用它来集成和定制 AI 功能,以满足各种机器人应用的需求。同时,初创公司和企业也能借此加速机器人产品的开发进程,有效降低训练成本,从而更快地将创新成果推向市场。
行业影响与独特洞察
GR00T N1 的出现,正推动着机器人领域从特定任务的“专家”模式向具备泛化能力的“通才”模式转变。它不再仅仅是执行预设指令,而是开始理解和推理复杂场景,并跨越不同硬件平台复用学习到的技能。
这种“跨载体”的通用性,是其区别于传统机器人控制模型的独特突破,真正将大模型范式引入机器人决策的核心。尽管模型展现出巨大潜力,但如何将其在模拟环境中验证的能力无缝迁移至高动态、不可预测的真实世界,并确保在安全性和可靠性上的鲁棒性,将是未来持续投入并需要解决的关键挑战。
更多技术细节可访问 NVIDIA 的 GitHub 页面查阅:https://github.com/NVIDIA/Isaac-GR00T,
或在 Hugging Face 平台了解模型详情:https://huggingface.co/nvidia/GR00T-N1-2B