1.引言
20 世纪 80 年代末至 90 年代初,面向对象编程(OOP)通过模块化组件的构建方式革新了软件开发。如今,分布式系统开发正经历类似的变革,基于容器的微服务架构成为主流。容器凭借其边界隔离特性(如 Docker、Linux 容器等),成为分布式系统的理想“对象”。随着这种架构风格的成熟,设计模式逐渐涌现——正如 OOP 的发展历程——通过抽象底层细节,揭示跨应用和算法的通用高阶模式。
本文描述三类容器化分布式系统的设计模式:
- 单容器管理模式:容器自身的生命周期管理。
- 单节点多容器协作模式:同一节点上容器的紧密协同。
- 多节点分布式算法模式:跨节点的协调与计算。
这些模式编码了最佳实践,简化开发并提升系统可靠性。
2.分布式系统设计模式的演进
与 OOP 设计模式(如《设计模式:可复用面向对象软件的基础》)类似,分布式系统模式正逐步规范化。早期的 MapReduce 虽成功,但受限于 Java 生态(如 Hadoop)。容器技术的兴起提供了语言中立的分布式系统构建单元,其优势包括:
- 密封性:依赖项内置,部署原子化(成功/失败明确)。
- 标准化接口:超越传统的
run()/pause()/stop(),支持 HTTP 管理 API(如健康检查/health)。
3.单容器管理模式
容器边界天然定义了接口,可扩展为双向管理协议:
- 向上接口(Upward API):暴露应用指标(QPS、健康状态)、性能分析数据(线程、锁争用)、日志等。例如 Kubernetes 的健康检查端点。
- 向下接口(Downward API):定义生命周期钩子(如优雅终止
SIGTERM→SIGKILL),支持状态序列化、优先级调度等。参考 Android 的Activity生命周期模型。
示例:
CMD ["sh", "-c", "trap 'exit 0' SIGTERM; while true; do sleep 1; done"]4.单节点多容器协作模式
需容器管理系统支持原子化协同调度(如 Kubernetes 的Pod、Nomad 的task group):
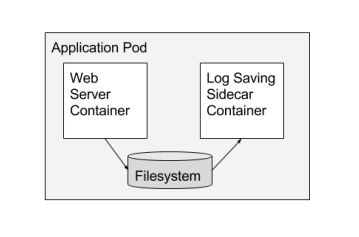
4.1 Sidecar 模式
扩展主容器功能,如:
- 日志收集:主容器(Web 服务器) + Sidecar(日志上传至集群存储)。
- 数据同步:主容器(静态文件服务器) + Sidecar(从 Git 同步内容)。
优势:
- 资源隔离:Sidecar 可配置低优先级 CPU。
- 独立开发:团队分工明确(如日志服务团队与业务团队)。
- 复用性:同一 Sidecar 可服务多个主容器。
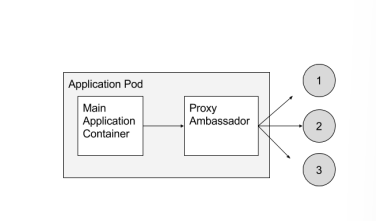
4.2 Ambassador 模式
代理主容器的外部通信,例如:
- Memcached 分片:主容器连接
localhost:11211,Ambassador(如 Twemproxy)实际路由至集群分片。
优势:
- 透明性:应用无需感知分布式细节。
- 测试简化:本地开发时可替换为真实 Memcached 实例。
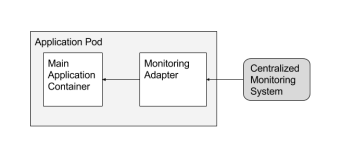
4.3 Adapter 模式
标准化对外接口,例如:
- 监控统一化:适配器将 JMX、StatsD 等转换为 Prometheus 格式。
优势:
- 异构整合:无需修改遗留应用即可接入统一监控系统。
5.多节点分布式算法模式
5.1 Leader Election(领导者选举)
问题:分布式系统中需选举主副本(如分片主节点)。
方案:专用 Leader Election 容器通过 HTTP API(如/becomeLeader)与主容器交互,解耦语言限制。
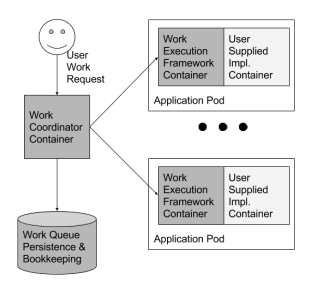
5.2 Work Queue(工作队列)
通用框架:用户仅需实现处理逻辑容器(输入→输出),框架处理任务分发、状态跟踪等。
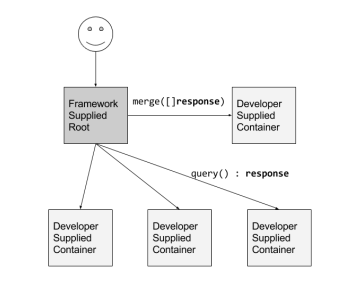
5.3 Scatter/Gather(分散/聚合)
搜索引擎场景:
- 根节点接收请求并分散至叶子节点。
- 叶子节点返回部分结果,由聚合容器合并。
6.相关工作
- SOA:粗粒度、业务导向,而容器模式更接近“分布式库”。
- 微服务:与本文模式高度重合,但缺乏标准化管理接口(对比 SNMP)。
- 现有系统:Kubernetes、Docker Swarm 等支持容器协同调度。
7.结论
容器设计模式正如同 OOP 模式一样,通过封装、复用和语言中立性,推动分布式系统开发的标准化。未来,这些模式将随容器生态的成熟持续扩展,重塑分布式计算的工程实践。